ساخت ابزار جراحی هوشمند برای جبران لرزش دست جراحان
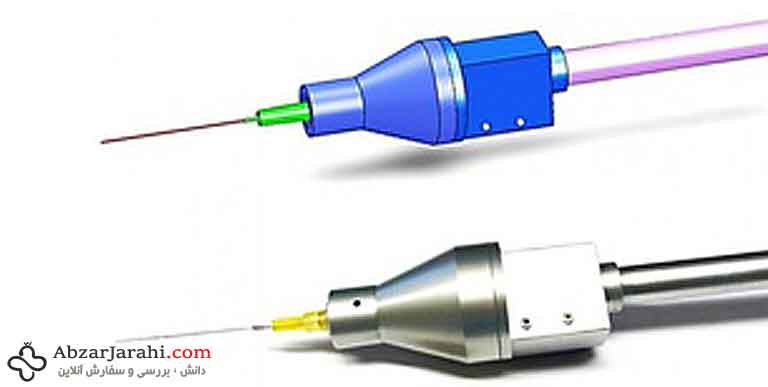
این دستگاه دستی موسوم به «Smart» (ابزار روباتیک جراحی دستکاری میکروسکوپی هوشمند کمکی) از یک لیزر نزدیک مادون قرمز برخوردار بوده که از نوک آن بر روی منطقه هدف در بافت بیمار منتشر میگردد.
این لیزر به عنوان یک حسگر مسافتی عمل کرده و از یک کابل فیبر نوری برای دریافت پالسهای نور منتشر گردیده و انتقال بازتاب این پالسها به یک رایانه متصل استفاده میکند. این رایانه با بررسی اطلاعات میتواند زمان و میزان حرکت در بافت را تأمین کند.
نوک این ابزار همچنین از موتورهای فیزوالکتریک دارای پایه برخوردار بوده که اتصال ابزاری مانند چاقوی جراحی یا پنس را بر روی خود ممکن میکند.
هنگامی که رایانه با لرزش دست روبرو میگردد، آنرا با فعال کردن موتورها برای حرکت موارد اتصالی در ارتباط با آن جبران میکند. برای مثال اگر جراح سهواً کل ابزار را برای میزان 10 میکرون به سمت چپ حرکت دهد، ابزار اسمارت بطور خودکار آنرا با تغییر محل چاقو برای 10 میکرون به سمت راست جبران میکند.
این تنظیمات با سرعت 500 بار در ثانیه انجام گردیده که بسیار سریعتر از فرکانس لرزش در 15 بار در ثانیه است.
تاکنون این فناوری بر روی مدلهای خشکشده و یک جنین زنده مرغ برای دورههای تا 30 ثانیه آزمایش گردیده که تا این مرحله نشاندهنده دقت کافی آن برای ارزیابی ویژگیهای اولیه فیزولوژیکی لرزش دست جراح بوده است.
با اینحال برای آزمایشات بیشتر و واقعیتر باید از این دستگاه در یک عمل جراحی بالای سه ساعت مورد آزمایش قرار بگیرند که محققان امیدوارند بتوانند در چند سال آینده این کارآزمایی را انجام دهند.
(نتایج این پژوهش در مجله Optics Express منتشر گردیده است.)
